輪式移動(dòng)機器人底盤(pán)其實(shí)與其他機器人底盤(pán)略有不同,這類(lèi)輪式機器人能夠滿(mǎn)足多方位移動(dòng)的可能,在不同環(huán)境下也能夠快速適應。機器人底盤(pán)承載了機器人本身的移動(dòng)、定位、導航與避障的基本功能,能夠讓機器人實(shí)現智能移動(dòng)。
智能移動(dòng)底盤(pán)融合了激光雷達、超聲波傳感器,配合先進(jìn)的導航算法,讓機器人在陌生環(huán)境中也能輕松掃描建圖,快速適應,實(shí)現機器人多場(chǎng)景下,無(wú)需改造場(chǎng)地靈活運行。移動(dòng)機器人底盤(pán)續航時(shí)間長(cháng)、穩定性強,再結合自主回充技術(shù),能夠滿(mǎn)足機器人24小時(shí)不間斷的工作。
移動(dòng)機器人底盤(pán)是機器人的一種,它沒(méi)有機器人形態(tài),常見(jiàn)的樣子也不會(huì )讓人覺(jué)得是機器人,但它是很多服務(wù)型機器人的基礎,通過(guò)已有的底盤(pán)基礎進(jìn)行拓展,滿(mǎn)足場(chǎng)景應用需要。
底盤(pán)機器人屬于高端制造行業(yè),是多傳感器、SLAM、深度相機、激光雷達、超聲傳感等多項技術(shù)的融合,只有大型企業(yè)才有財力、有技術(shù)研發(fā)設計,不同行業(yè)的機器人公司再通過(guò)軟硬件的二次開(kāi)發(fā),完成產(chǎn)品鏈閉合。

創(chuàng )澤智能移動(dòng)式感知底盤(pán)主要由激光雷達,深度攝像頭,超聲波及防跌落傳感器等核心硬件組成,作為機器人的雙腳,是實(shí)現機器人自主移動(dòng)避障等多種功能的重要核心部件
機器人移動(dòng)和承載的支撐在底盤(pán),創(chuàng )澤六輪機器人底盤(pán)作為機器人的雙足,具有靈活性強,運動(dòng)噪音低等特點(diǎn),可以模擬人類(lèi)自由行走的能力
創(chuàng )澤通用機器人底盤(pán)拓展性非常強,可搭載不同機械設備實(shí)現多領(lǐng)域應用,如消毒機器人,迎賓機器人,講解機器人,配送機器人和巡檢機器人等,可廣泛適用于餐廳商場(chǎng)銀行辦公樓等場(chǎng)景
巡航機器人底盤(pán)可以自動(dòng)更改行走線(xiàn)路無(wú)需人工干預,并且可以使用自身搭載的傳感器進(jìn)行導航,無(wú)需進(jìn)行場(chǎng)地改造鋪設軌道等,定位精度高可達到5cm
移動(dòng)機器人底盤(pán)續航10個(gè)小時(shí)以上,一次建圖超過(guò)幾萬(wàn)平方,融合多個(gè)視覺(jué)傳感器對行走環(huán)境進(jìn)行立體建模,滿(mǎn)足多種場(chǎng)景下使用有5大優(yōu)勢
創(chuàng )澤消毒機器人底盤(pán)開(kāi)放的軟硬件接口,可搭載消毒設備在商場(chǎng),餐廳,辦公樓,銀行等場(chǎng)景下自主移動(dòng)并智能規劃路線(xiàn),進(jìn)行消毒作業(yè),全方位立體無(wú)死角消毒
創(chuàng )澤導航服務(wù)機器人底盤(pán)開(kāi)放的軟硬件接口,為研發(fā)人員節省大量的時(shí)間精力和成本,可應用于消毒機器人,配送機器人和迎賓服務(wù)機器人等多種產(chǎn)品場(chǎng)景
創(chuàng )澤機器人底盤(pán)機身尺寸小巧緊湊,50多CM最小窄道通行能力,不管在酒店走廊與人擦肩而過(guò),還是在餐廳餐桌間的走道穿梭還是在超市,便利店等場(chǎng)景行走都十分順暢
創(chuàng )澤機器人平臺提供完善的SDK,任意進(jìn)行二次開(kāi)發(fā),根據內容進(jìn)行交互,交互內容可以根據配置設定為調侃或業(yè)務(wù)咨詢(xún),提供機器人表情和機器人對話(huà)界面
采用激光SLAM自然導航,機器人更加自主靈活;地圖面積不受限制,滿(mǎn)足大空間場(chǎng)景使用;能與電梯,電動(dòng)門(mén)實(shí)時(shí)通訊,滿(mǎn)足跨樓層,跨病房使用
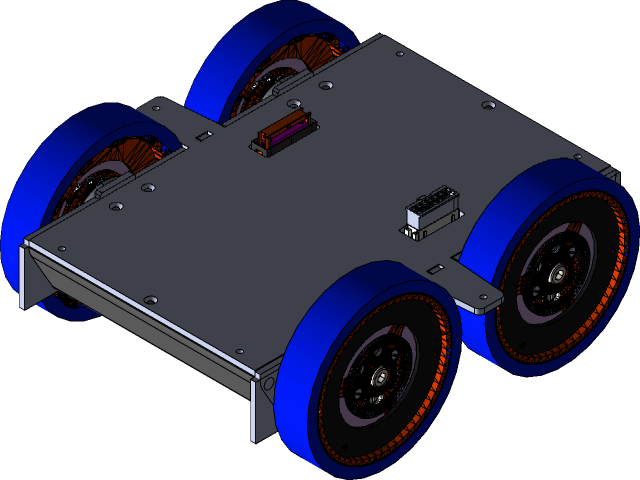
底盤(pán)機器人小車(chē)3D數模設計圖紙Solidworks,機器人底盤(pán)設計圖紙鏈接:https://pan.baidu.com/s/1EiO1ufVPU04hU1MpzNNlcw 提取碼:ynai
安裝6路LED模組;LED燈的安裝位置和含義;LED燈閃爍方式的設計,自定義了幾種LED閃爍的方式;點(diǎn)燈模組的模式選擇LED閃爍狀態(tài)的切換方式
連線(xiàn)完畢后,打開(kāi)我們的程序,找到 sensors.h 文件,為了測試超聲波測距是否準確,需要取消掉第二大段的注釋,然后再次將程序燒錄到Arduino開(kāi)發(fā)板中
思嵐機器人底盤(pán)A1M8測距范圍是8-12m,滿(mǎn)足居家環(huán)境的室內純激光里程計定位與建圖;機器人底盤(pán)s2超長(cháng)30m測距范圍,長(cháng)走廊或者是電梯井等場(chǎng)景均可滿(mǎn)足
思嵐機器人底盤(pán)是一款可擴展的通用型服務(wù)機器人開(kāi)發(fā)平臺,采用SharpEdge構圖技術(shù),構建厘米級高精度地圖,配合導航算法,讓規劃行走路線(xiàn)的更靈活
智能電源管理系統是在機器人內首次引入了車(chē)載級別的安全方案;六輪懸掛底盤(pán)區別于輪式機器人常用的3輪和4輪結構;使用了基于消息的CAN協(xié)議